与传统的刚性机器人相比,软体机器人具有与人交互性好、灵活性高、柔韧性好等独特优势,引起了人们的广泛关注。综合考虑操作的实用性和稳定性,集成、轻量化和智能化是软机器人的发展方向。引入机械手等额外的分离功能模块,不利于机器人的快速和稳定运行。此外,现有的水生软体机器人(Nature 2021, 591, 66–71; Sci. Adv. 2017, 3, e160204)多为电机或燃油发动机驱动,难以满足环境友好和可持续驱动的需求。一些光响应的自驱动水凝胶由于其固有的机械性能差,在复杂的水生环境中容易受到破坏,成为这些微型机器人在实际应用时的另一个主要障碍。因此,如何制备强韧化、可修复的自驱动集成机器人仍然是一个重大挑战。
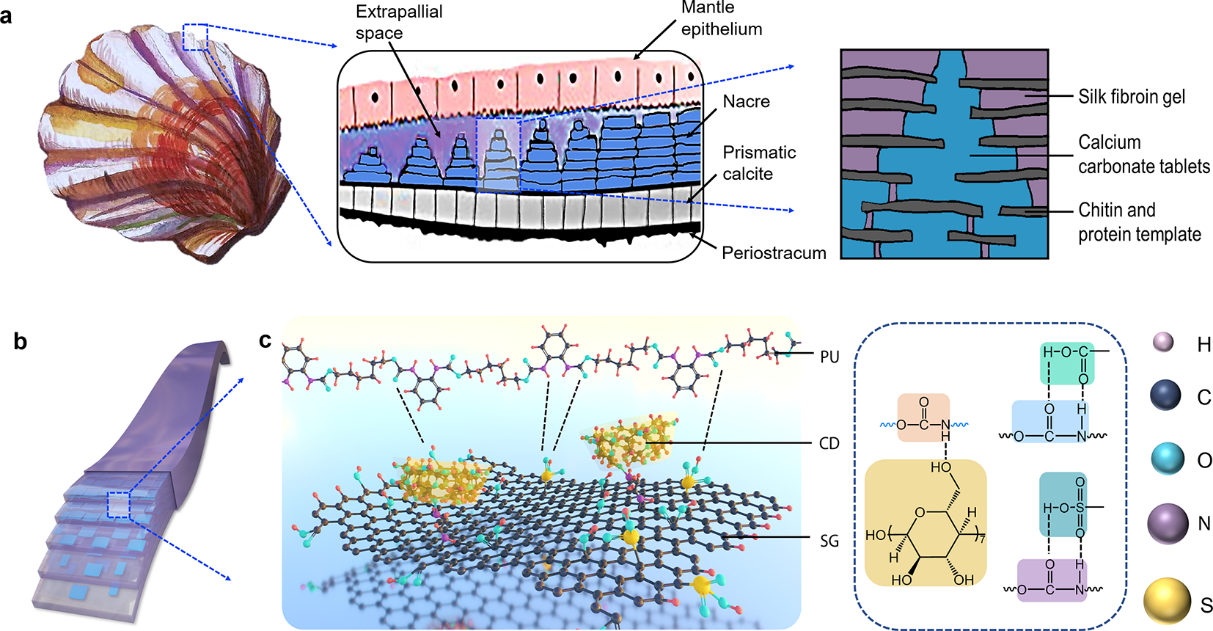
图1 软体机器人材料结构设计
近日,四川大学与四川农业大学、西北工业大学合作受珍珠质的启发,通过超分子多尺度组装制备一种磺化石墨烯基梯度纳米结构的弹性体驱动器(图1)。通过梯度组装工艺,研究者创新性地引入功能填料与聚合物软基体之间的多重界面氢键。动态氢键的断裂和重组在分子尺度上赋予材料自修复能力和力学增强特性。得到的纳米复合材料具有141.19 MJ/m3的超高韧性和89%的室温自愈合效率。所制备的概念验证微型机器人最大游泳速度为每秒2.67倍体长,与自然界浮游生物相当,表现优于大多数人造软体机器人。此外,由于微塑料上的有机染料、抗生素、重金属等可与机器人上大量的环糊精分子和磺酸基团间有很强的Π-Π相互作用、主客体识别作用和静电相互作用,使微塑料能够吸附在机器人表面。因此,制备的机器人能够多次稳定地吸附污染物,即使受到损伤也能恢复其机械鲁棒性和功能。这项研究打破了功能执行和快速运动的互斥性,通过纳米结构组装和超分子相互作用的协同效应,实现集成功能所需的填料高填充与机器人的延展性、稳定性及耐久性的兼顾。研究者相信这种纳米结构设计将为其他需要多功能集成的软体机器人提供有效的指导。
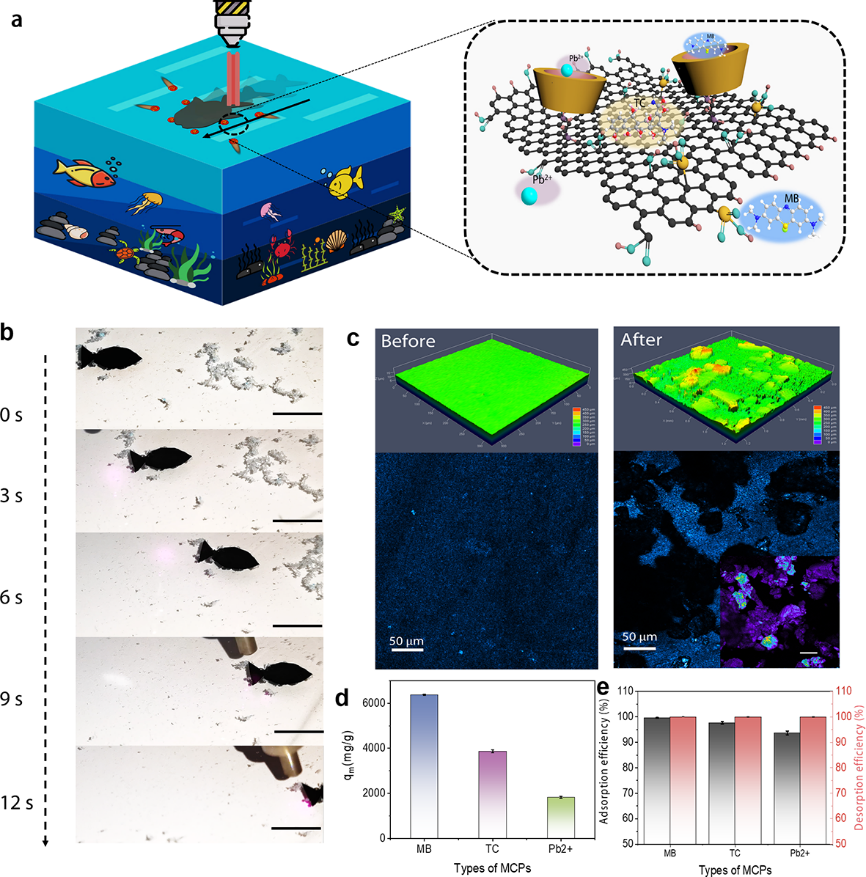
图2 微型机器人微塑料吸附功能
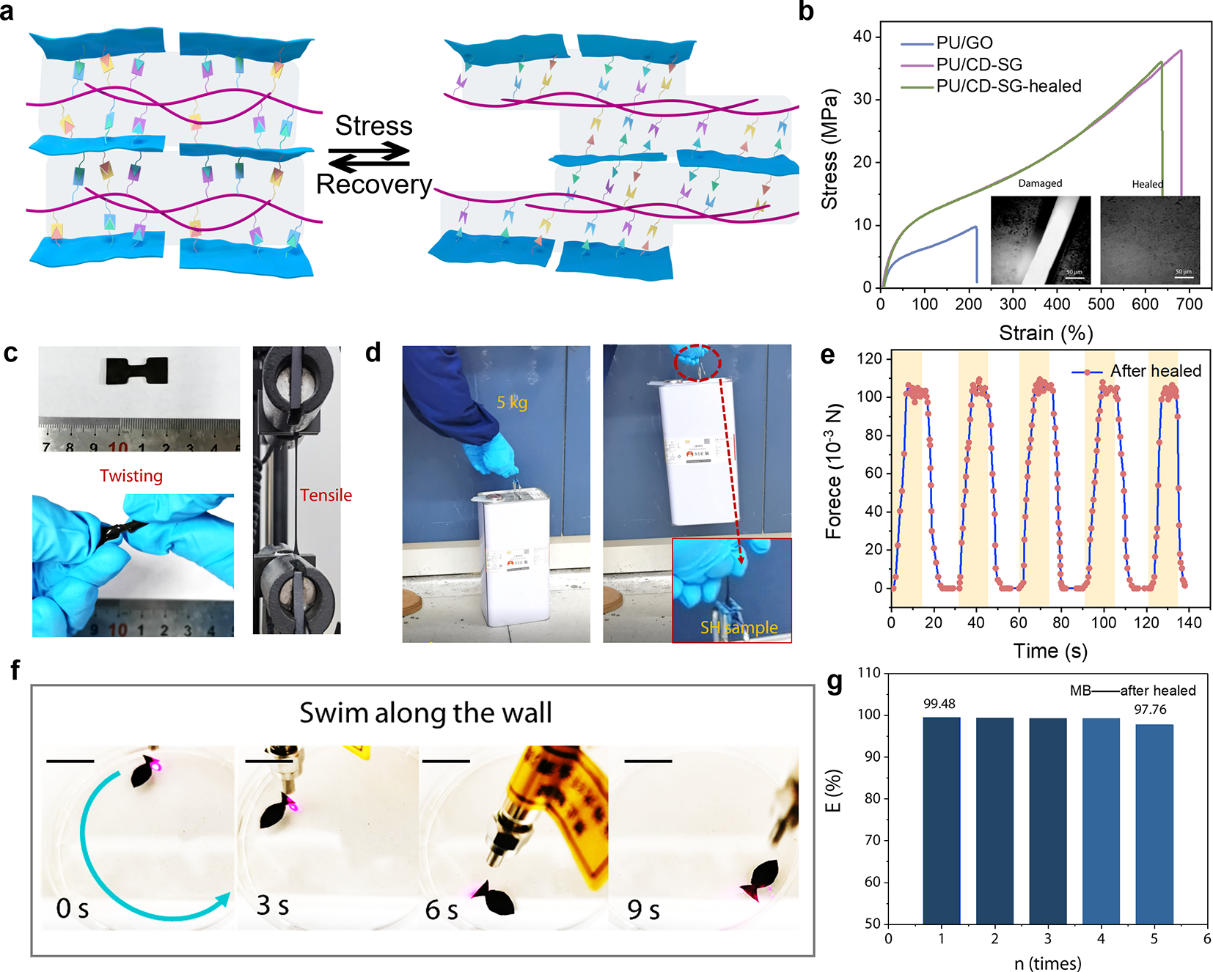
图3 机械性能与功能修复
上述工作以“Robust, Healable, Self-Locomotive Integrated Robots Enabled by Noncovalent Assembled Gradient Nanostructure”为题近期发表在Nano Letters (DOI: 10.1021/acs.nanolett.2c01375)上。论文第一作者为四川大学高分子研究所博士生王宇嫣,通讯作者为高分子材料工程国家重点实验室(四川大学)张新星教授。本工作受《BBC科学焦点》《卫报》《独立报》《发现》、美国科学促进会(AAAS) EurekAlert等20多家国际报刊杂志媒体邀请采访并亮点报道。本研究工作得到国家重点研发计划(2020YFC1909500),国家自然科学基金(51873123, 52173112)和四川省杰青的资助。
论文链接:https://pubs.acs.org/doi/full/10.1021/acs.nanolett.2c01375