目前,各种电气设备和系统的控制操作,从常见的照明开关到公共场所的电梯或银行提款机,都是依靠触摸式操作来完成的,然而,这种传统的接触传感和操控会带来不可避免的磨损和疲劳。通常,在一些医院等特殊场合,传统接触式人机交互界面是多种细菌和病毒的潜在载体,极易造成用户或医疗设施的污染,尤其是在全球新冠肺炎流行期间。湿度场是典型的非接触空间影响物理场,受此启发,可以利用湿度敏感机理来进行“隔空”检测与操控。
针对目前传统接触式人机交互存在的问题以及刚性人机交互界面在极端高形变,高扭曲场景中的局限性,刘景全教授与杨斌教授团队通过静电纺丝和超声共融工艺,提出一种基于多层石墨烯(MG)超声修饰静电纺丝柔性尼龙(PA)66的电阻型湿度敏感体系,一方面通过纳米纤维网络的物理结构设计有效提高比表面积、增强了基底的毛细作用,另一方面巧妙利用PA66本身分子化学结构中大量的酰胺键易与水分子形成氢键作用的机理,使得复合材料极易“吸水变形膨胀”,从而造成导电网络变化,实现柔性湿度敏感。
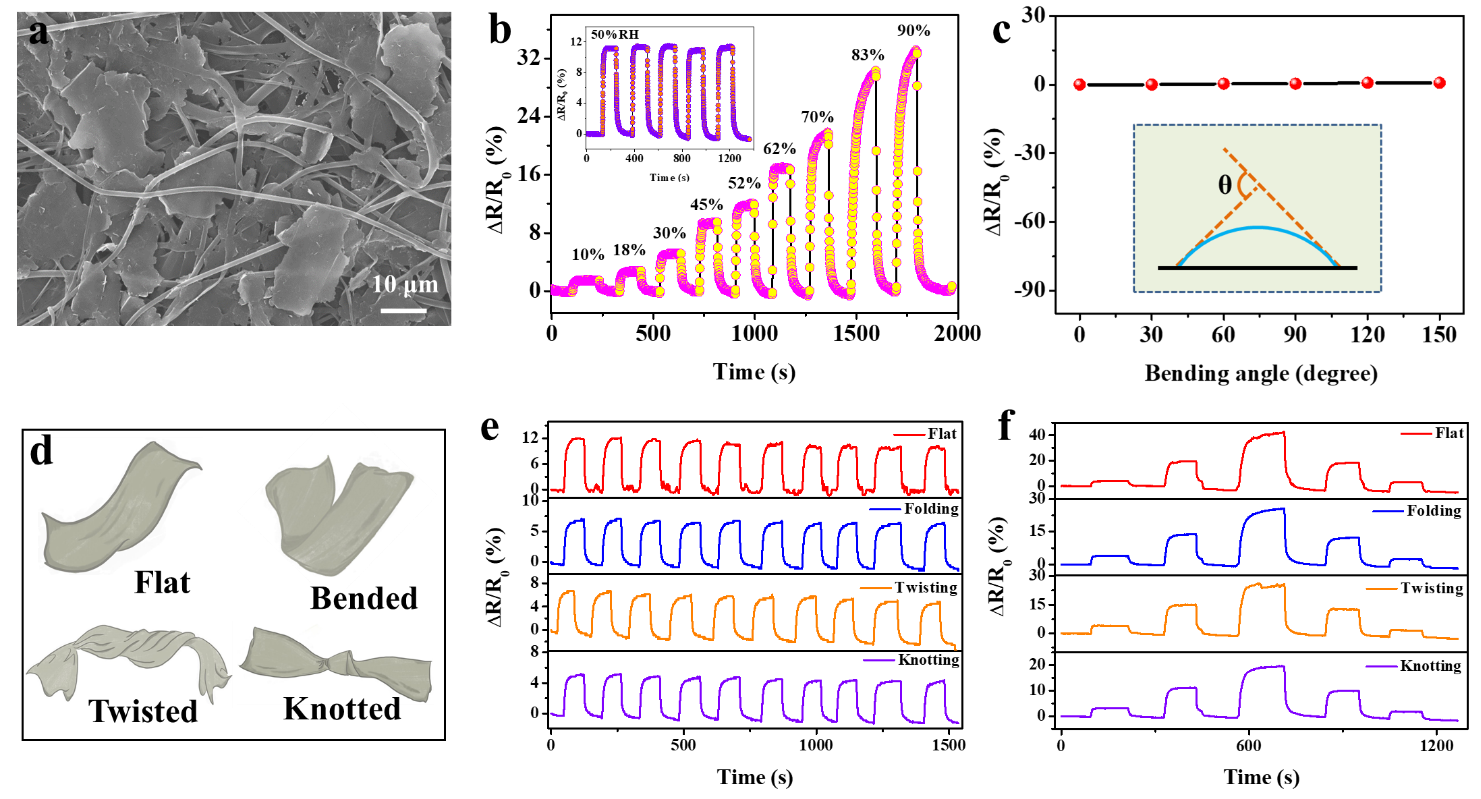
图1. MG/PA66复合材料结构与性能表征:(a)扫描电镜图,(b)相对电阻碎不同湿度变化的变化,(c)不同弯曲角度情况下材料电阻稳定性,(d)四种不同的物理结构形式(平的、折叠的、扭曲的和打结的)与它们分别在20 ~ 50%RH之间的循环响应性能(e),以及在湿度阶梯变化下20% RH- 50%RH- 80% RH- 50%RH - 20% RH)的响应性能
基于湿度敏感机制,通过检测口鼻处呼吸湿度变化,该工作通过试试远程检测呼吸频率的方法在一定程度上模拟了哮喘等呼吸急促场景,并且成功实现了远程实时监测与预警系统。
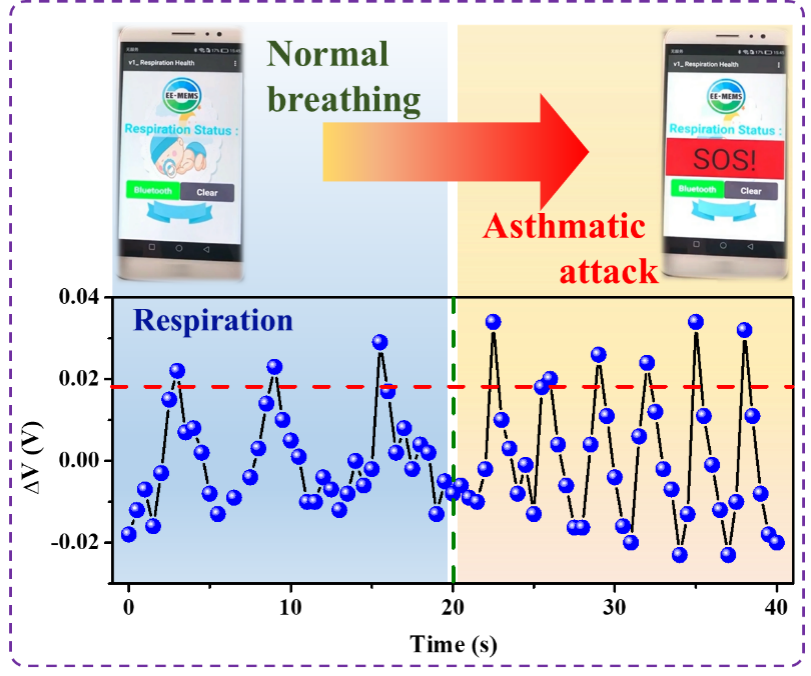
图2. 哮喘远程监测预警模拟
该工作利用湿度敏感机制来实现柔性非接触的远程监测与非接触操控系统,建立了不同情况下湿度变化与传感器信号响应的关系,实现了对环境或者人体皮肤表面小微湿度变化的准确检测,通过MEMS工艺构建阵列式传感器,能够实现非接触多点检测以及滑动手势识别。通过进一步开发了后端电路与专用APP,利用湿度敏感效应成功实现柔性非接触式的人机操控系统,为柔性可穿戴非接触传感与操控提供了一个普适有效的方法。

图3. 利用人体指尖小微湿度实现柔性非接触操控
原文链接:https://onlinelibrary.wiley.com/doi/10.1002/adma.202100218
全文链接:http://www.polymer.cn/sci/kjxw18032.html