为应对未来以人为导向可穿戴功能性电子设备和分布式微纳传感网络快速发展带来的电能供应和无负担式携带的挑战,新一代智能纺织品将传统纺织工艺与摩擦纳米发电技术相结合,所开发的摩擦纳米发电织物有利于实现自主式机械能收集利用和自驱动信号传感。然而,基于摩擦纳米发电机智能纺织品的大规模应用目前仍存在两大瓶颈—电量输出低和传感能力弱。因此,设计一种具有高功率输出和高传感灵敏度的智能发电织物是极其有必要的。
近日,中国科学院北京纳米能源与系统研究所王杰研究员和王中林院士研究团队在智能发电与传感织物方面取得新进展,相关研究成果发表在《Nature Communications》上。针对以上问题,本文提出一种基于摩擦纳米发电机的形状可设计且高度压缩回弹的三维编织结构智能发电和传感织物。这种三维编织智能发电和传感织物由外编织支撑框架和内轴芯柱组成三维空间框架柱结构,能够实现在压缩载荷卸除下的快速回复。该三维编织智能发电和传感织物具有高的压缩回弹性(压缩回弹系数:60%)、多样的截面形状设计(矩形、正方形、圆环形等)、增强的电量输出(峰值功率密度:26 W m-3)、微小压力快速响应以及振动能量收集能力。该研究工作将这种三维编织结构智能织物应用在具有人体运动行为监测和远距离安全救助功能的智能鞋、以及具有入口防护和入侵预警功能的自驱动身份识别地毯中。该研究工作的第一作者为董凯副研究员,彭晓硕士为共同第一作者,王杰研究员和王中林院士为通讯作者。
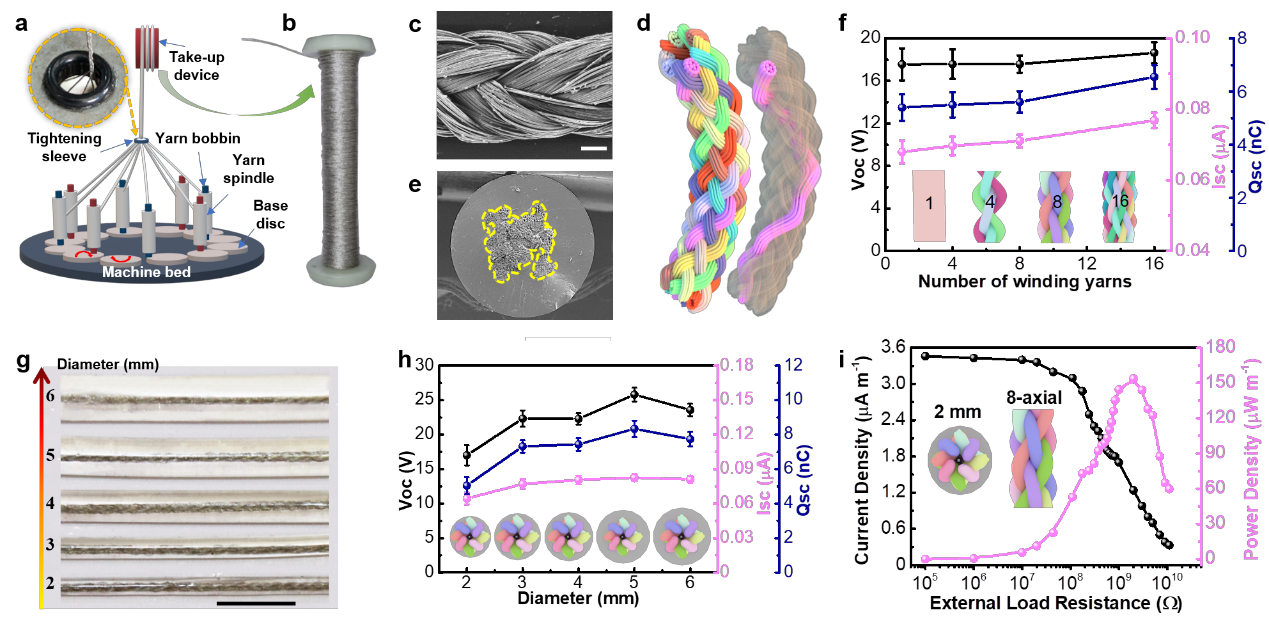
图1. 能量(发电)纱的结构设计以及性能分析。(a) 多轴向纱线缠绕机的结构示意图,其中左上角放大部位为交织口。(b) 具有连续多轴向缠绕纱线的纱轴照片。(c) 一种具有十轴向缠绕纱线的表面形貌SEM图。(d) 十轴向缠绕纱线的结构示意图。不同颜色设计的目的是便于观察单个纱线在多轴向缠绕纱线中的分布和移动轨迹。(e) PDMS包覆能量纱的横截面SEM图。(f) 缠绕纱线数量对能量纱电输出性能的影响。(g) 不同直径PDMS包覆能量纱的实物照片。(h) PDMS包覆直径对能量纱电输出性能的影响。(i) 在PDMS包覆能量纱直径为2 mm、缠绕纱线根数为8根和加载频率为3 Hz的条件下,PDMS包覆能量纱在不同外接电阻下的电流密度和功率密度。
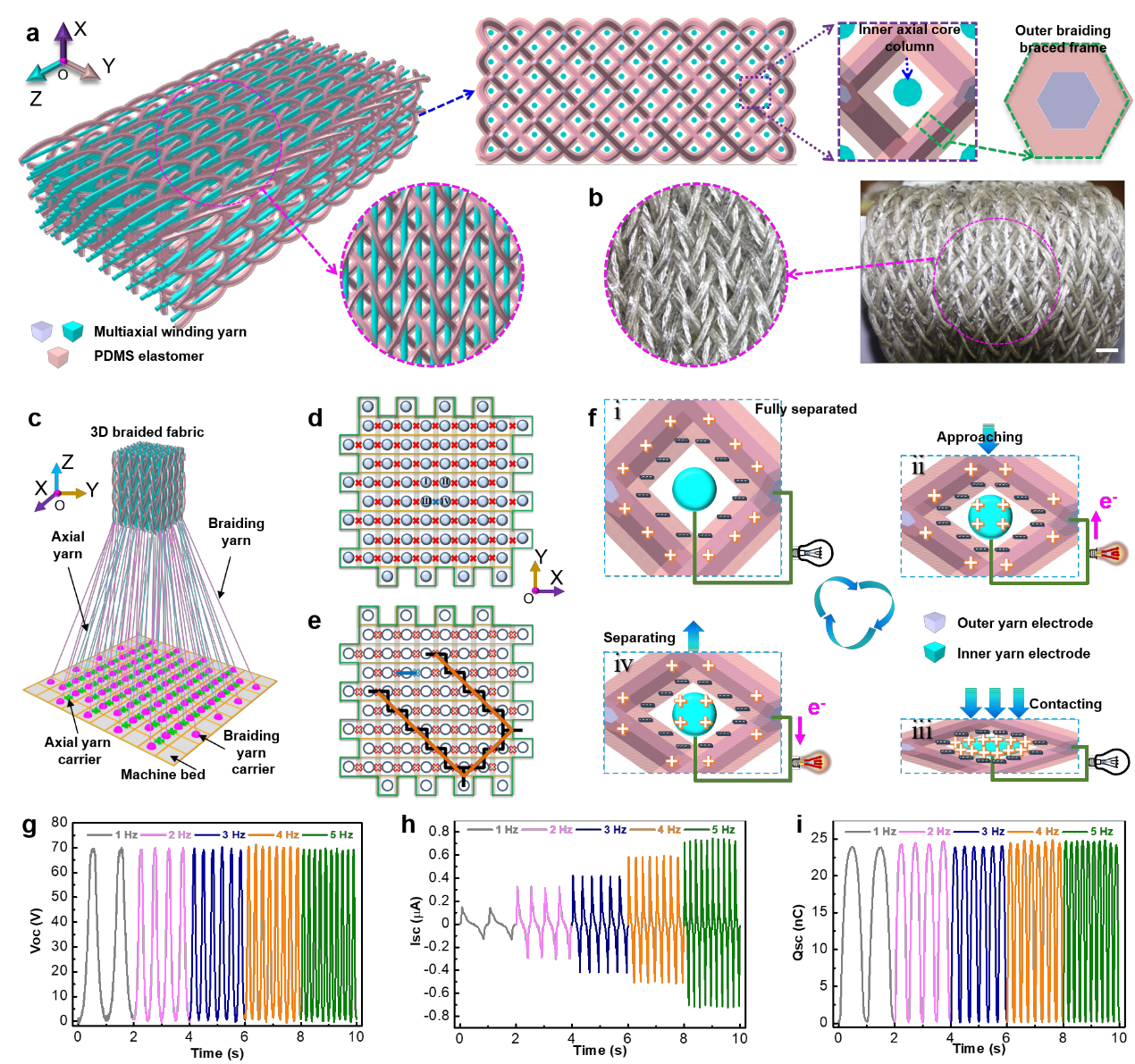
图2. 三维编织摩擦纳米发电织物的结构特征、工作原理和输出性能。(a) 三维编织摩擦纳米发电织物的结构特征,其主要包括外编织支撑框架和内轴芯柱两部分。(b) 三维编织摩擦纳米发电织物的实物照片。(c) 三维四步法矩形编织工艺示意图。(d) 携纱器在编织机床中的分布,其中编织纱携纱器和轴纱携纱器分别用“O”和“X”来表示。(e) 单根携纱器及其绑定纱线的运行轨迹。单根编织纱携纱器及其绑定纱线分别用橙色和黑色线表示,单根轴纱携纱器及其绑定纱线用蓝色线表示。(f) 三维编织摩擦纳米发电织物在垂直接触分离模式下的工作原理示意图。(g-i) 三维编织摩擦纳米发电织物在不同加载频率下(1-5 Hz)的电输出性能,包括开路电压(g)、短路电流(h)和短路电荷传输(i)。
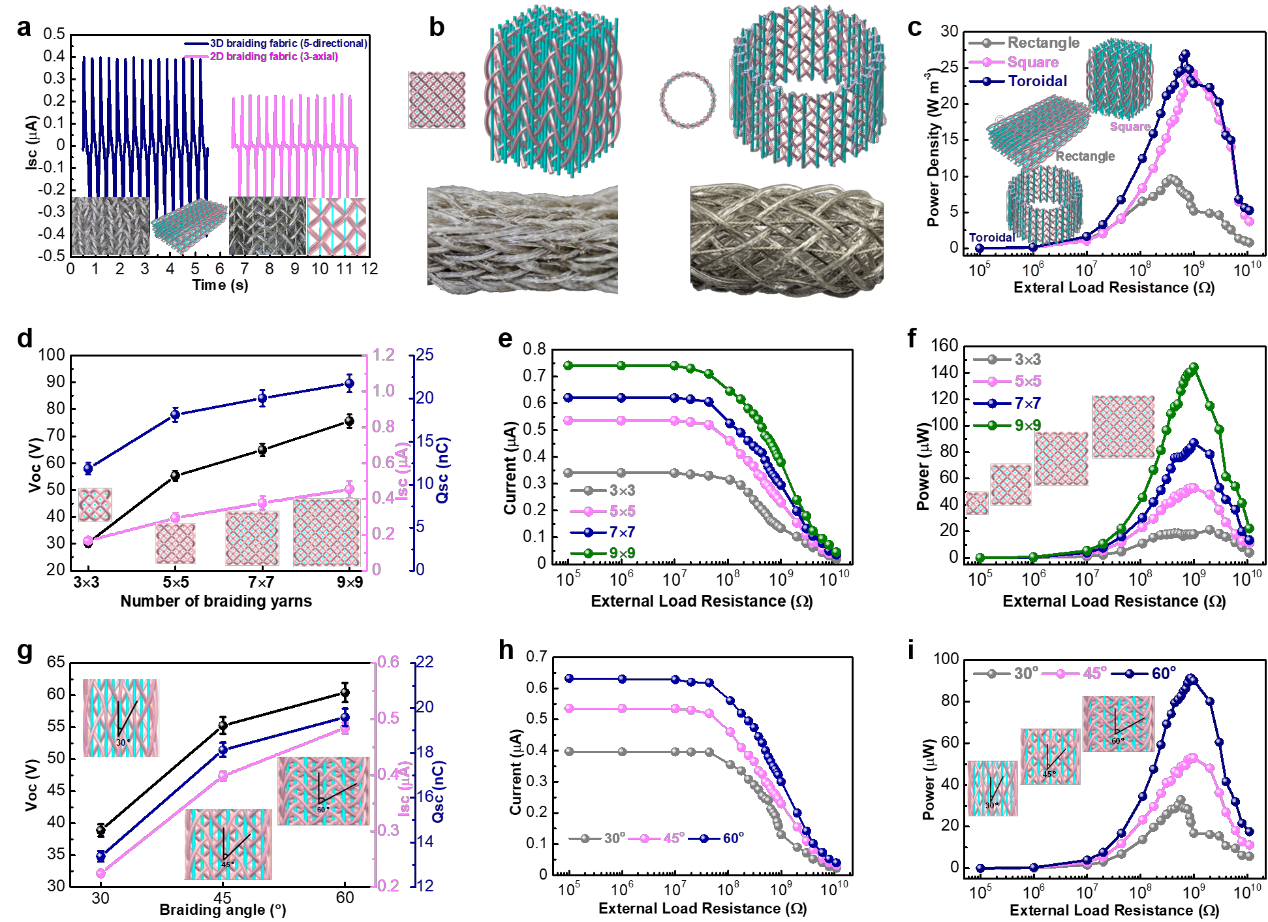
图3. 编织参数对三维编织摩擦纳米发电织物的电输出性能影响。(a) 比较三维编织摩擦纳米发电织物与多层堆叠二维三轴向编织发电织物的短路电流输出,其中它们各自照片和结构示意图显示在相应曲线下方。(b) 具有正方形和圆环形截面三维编织摩擦纳米发电织物的结构示意图和实物照片。(c) 比较具有矩形、正方形和圆环形截面三维编织摩擦纳米发电织物的功率输出密度。(d) 编织纱数量(包括3 × 3, 5 × 5, 7 × 7和9 × 9)对三维编织摩擦纳米发电织物的电输出性能影响。(e, f) 比较正方形截面三维编织摩擦纳米发电织物在不同编织纱线数量下的(e)电流和(f)功率输出。(g) 编织角(包括30°, 45°和60°)对三维编织摩擦纳米发电织物的电输出性能影响。(h, i) 比较正方形截面三维编织摩擦纳米发电织物在不同编织角下的(h)电流和(i)功率输出。
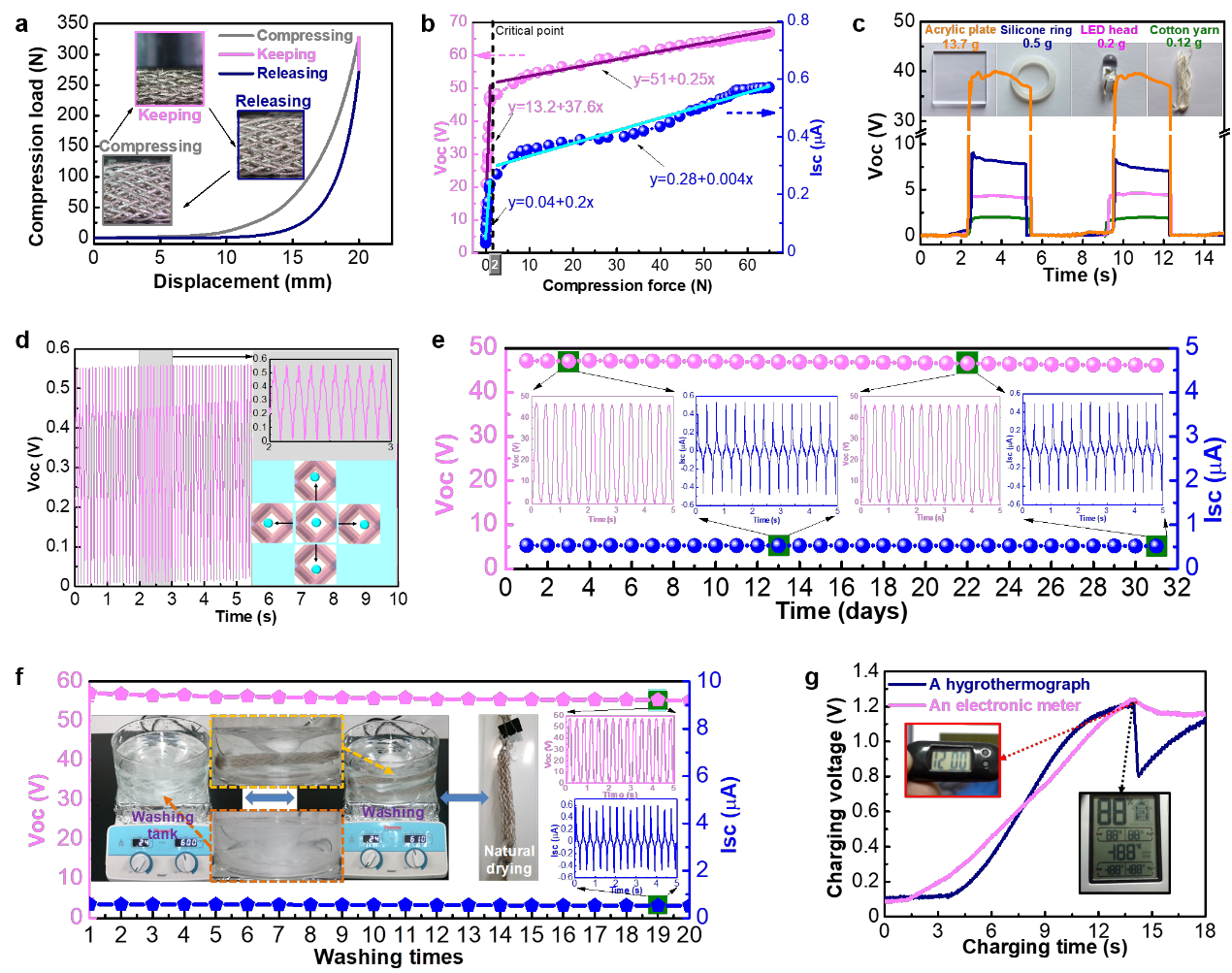
图4. 三维编织摩擦纳米发电织物的压力灵敏度、工作稳定性和可洗性。(a)三维编织摩擦纳米发电织物在压缩、保持和释放过程中的载荷位移曲线。(b) 三维编织摩擦纳米发电织物在不同压力载荷下的开路电压和短路电流输出。(c) 三维编织摩擦纳米发电织物对不同外界物体的压力灵敏度。(d) 在振动频率为10 Hz时,三维编织摩擦纳米发电织物的振动机械能量收集能力。其中,嵌入的上下图片分别为放大的开路电压输出曲线和振动能量采集原理。(e) 在连续加载一个月后,三维编织摩擦纳米发电织物的稳定性和耐久性分析。(f) 在洗涤20次后,三维编织摩擦纳米发电织物的可洗性分析。(g)三维编织摩擦纳米发电织物在驱动电子器件时的充电电压曲线。其中嵌入的图片为电子器件在启动工作时的状态。
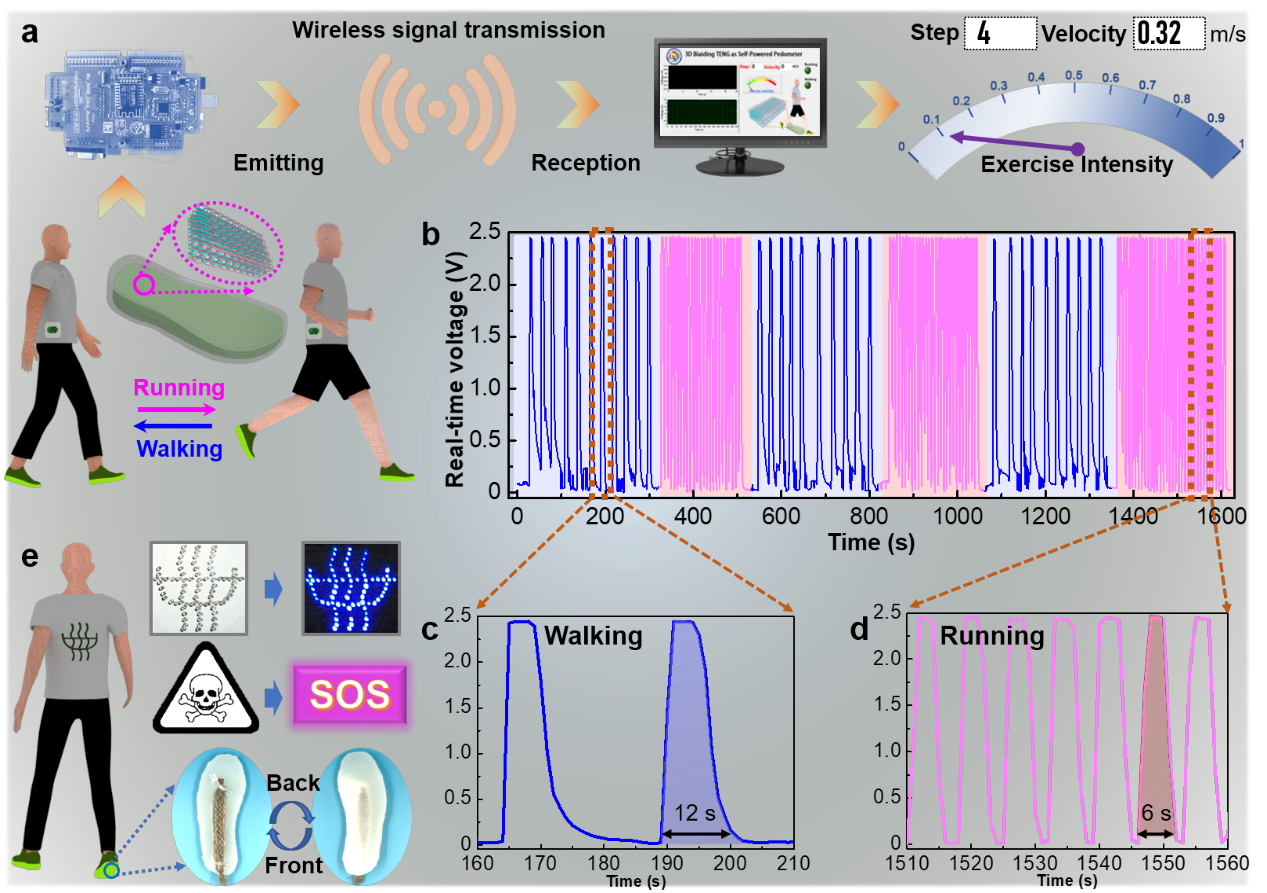
图5. 一种智能鞋类系统用于人体运动行为监测和远距离紧急救援。(a) 用于实时人体运动状态监测的智能鞋类系统的流程图,包括信号采集系统、无线传输模块、数据处理程序和软件输出界面。(b) 智能鞋类系统在走路(蓝色)和跑步(紫红色)交替运动状态下的实时电压信号。(c, d) 在走路(c)和跑步(d)下的放大电压信号比较,其中走路和跑步每一步所需间隔时间分别为12秒和6秒。(e) 智能鞋类系统在夜间安全防护和远距离紧急求助的应用演示。
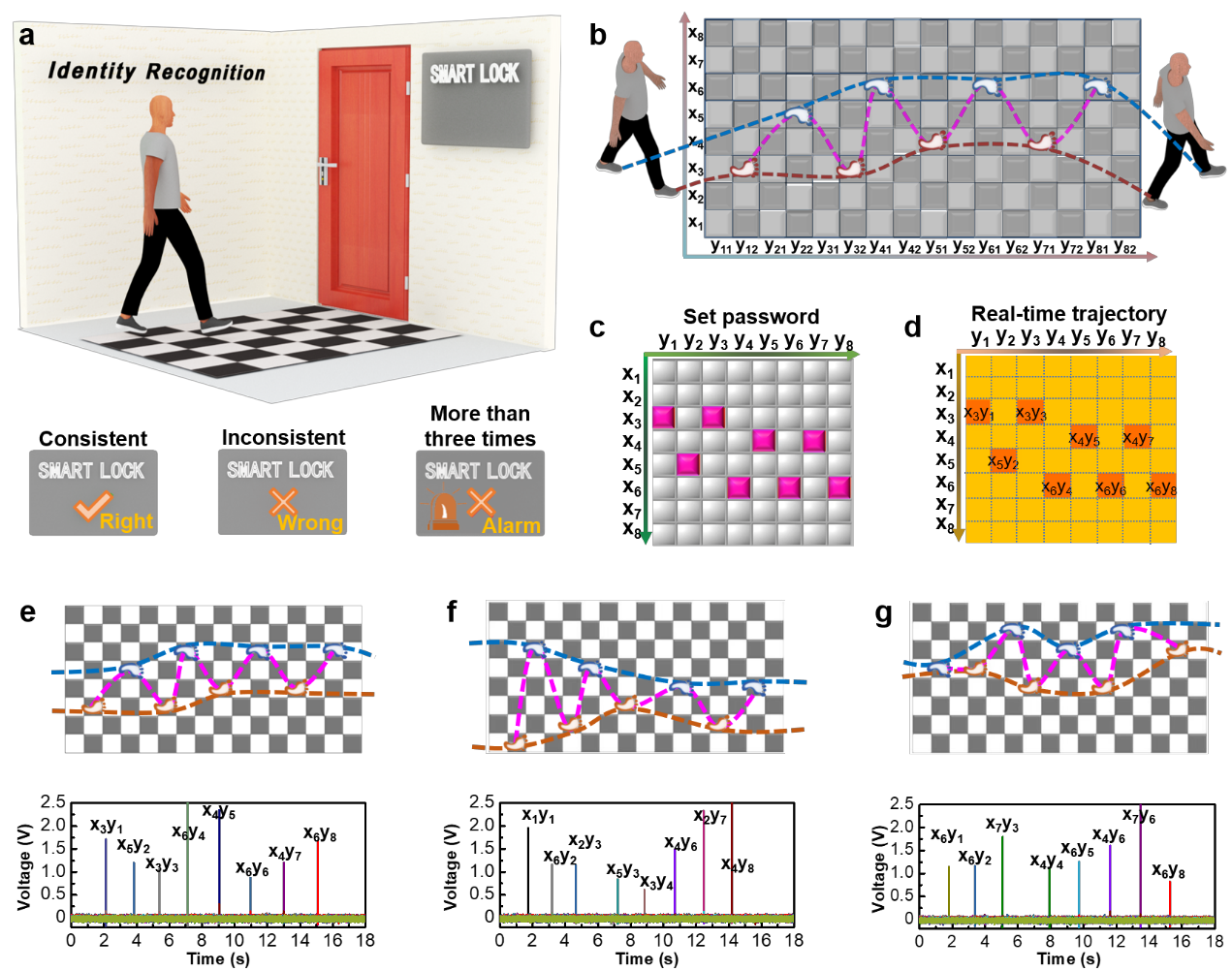
图6. 一种自驱动身份识别地毯用于安全防护和入侵预警。(a) 自驱动身份识别系统的流程图。其中,在屏幕上将会显示三种状态,包括“√”、“×”、和“×”并同时伴有报警声。(b) 在身份识别地毯上人体运动轨迹的示意图。其中,紫红色、蓝色和棕色虚线分别表示整个人、左脚和右脚的运动路径。(c, d) 设定的行走密码路径(c)和实时行走轨迹路径(d)的示意图。(e-g) 在身份识别地毯上的实时行走轨迹,包括正确密码路径(e)、首次错误密码路径(f)和连续三次以上错误密码路径(g)。64个相应传感单元的电压信号呈现在相应运动轨迹的下方,并且所踩到的传感单位的位置被标注在每个曲线上方。
全文链接:https://www.nature.com/articles/s41467-020-16642-6