模仿生物体的各类生物感受器是开发智能传感器的重要途径之一。例如,受人体皮肤机械感受器的启发,人工电子皮肤可实现对外界接触、按压、滑移等机械刺激的感知。但触觉传感器只能在物理接触时才具有感知功能,不能对外界非接触信号响应。
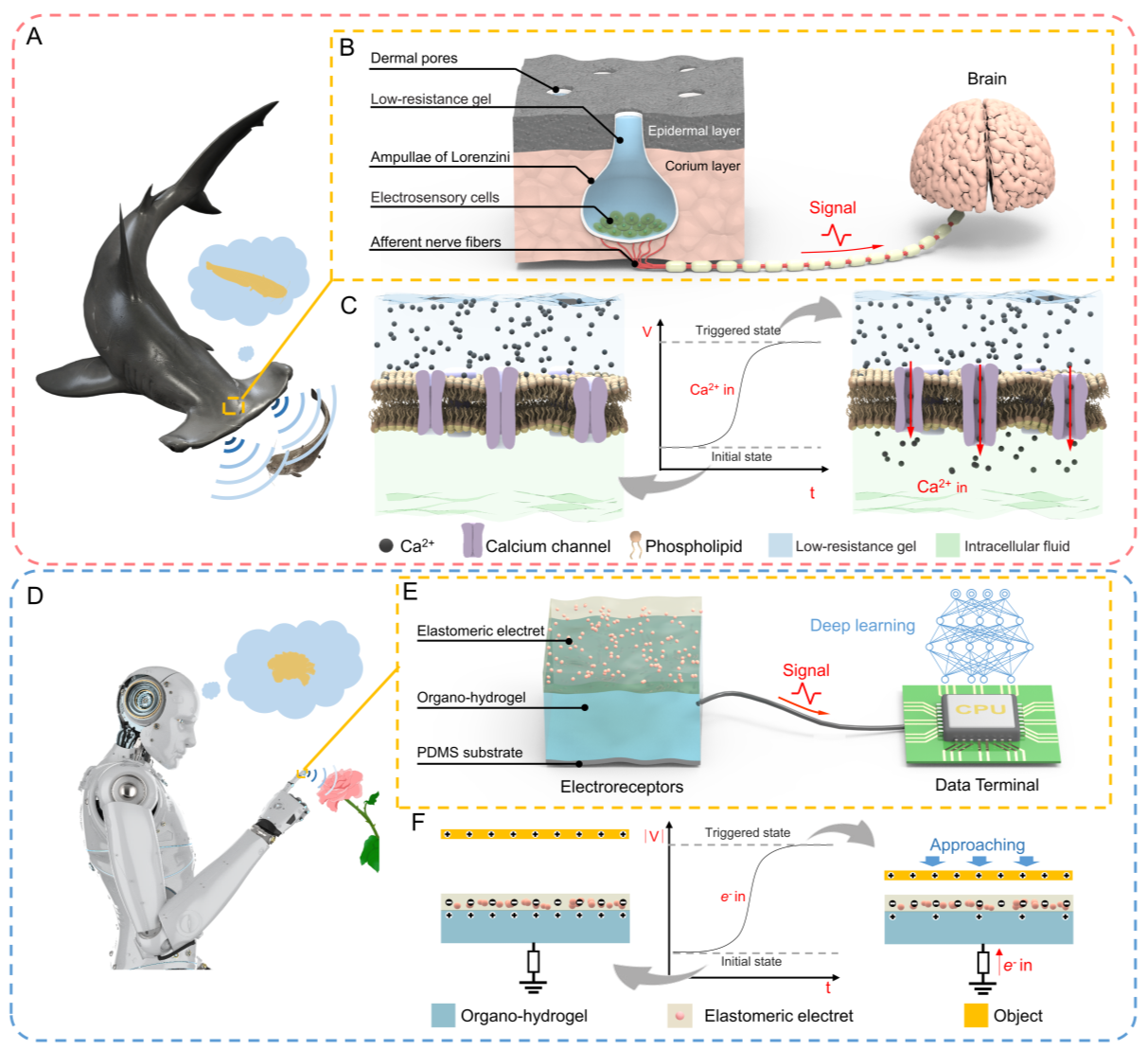
图1. 仿生软体电感受器。(A)分布在鲨鱼头部用于感知环境的电感应系统示意图。(B)鲨鱼电感受器的结构、(C)感知机制。(D)集成在机器人手指上用于目标感知的仿生人工电感受器的示意图。(E)人工电感受器的结构、(F)感知机制。
中科院北京纳米能源与系统研究所王中林院士、蒲雄研究员团队开发了一种仿生软体电感受器,可实现对外界物体的距离传感、三维轮廓识别、及非接触人机交互。一些海洋生物,例如鲨鱼或鳐鱼等,可以利用分布于皮肤上的一种名为电感受器的器官来感受弱电场,从而在黑暗的深海感知猎物或障碍物的距离、形状等信息,实现类比于“皮肤视觉”的功能(图1A-C)。研究团队受此启发,构建了一种基于软体聚合物材料的人工电感受器,其主要由可拉伸的驻极体层,有机水凝胶电极和PDMS封装层组成。当有带有电荷的外部物体或不带电的导体靠近人工电感受器时,由于静电感应效应,可在外电路负载上产生电压信号,从而实现对靠近物体的感知(图1D-F)。基于该人工电感受器,示意了距离预警机器人、非接触人机交互等应用示范(图2)。进一步地,借助于深度学习算法,验证了电感受器阵列用于识别物体三维轮廓的可行性(图3)。相比于电磁、激光、超声等距离传感器,该人工电感受器具有柔软可拉伸的优势,并且在距离越近时响应更高。这种新型的人工电感受器在可穿戴电子、软体机器人、智能义肢等领域具有应用前景。该工作以“Bioinspired soft electroreceptors for artificial precontact somatosensation”为题发表于《Science Advances》(Science Advances 2022, 8, eabo5201)。论文第一作者为北京纳米能源与系统研究所博士生郭子豪。该研究得到了国家自然科学基金的支持。
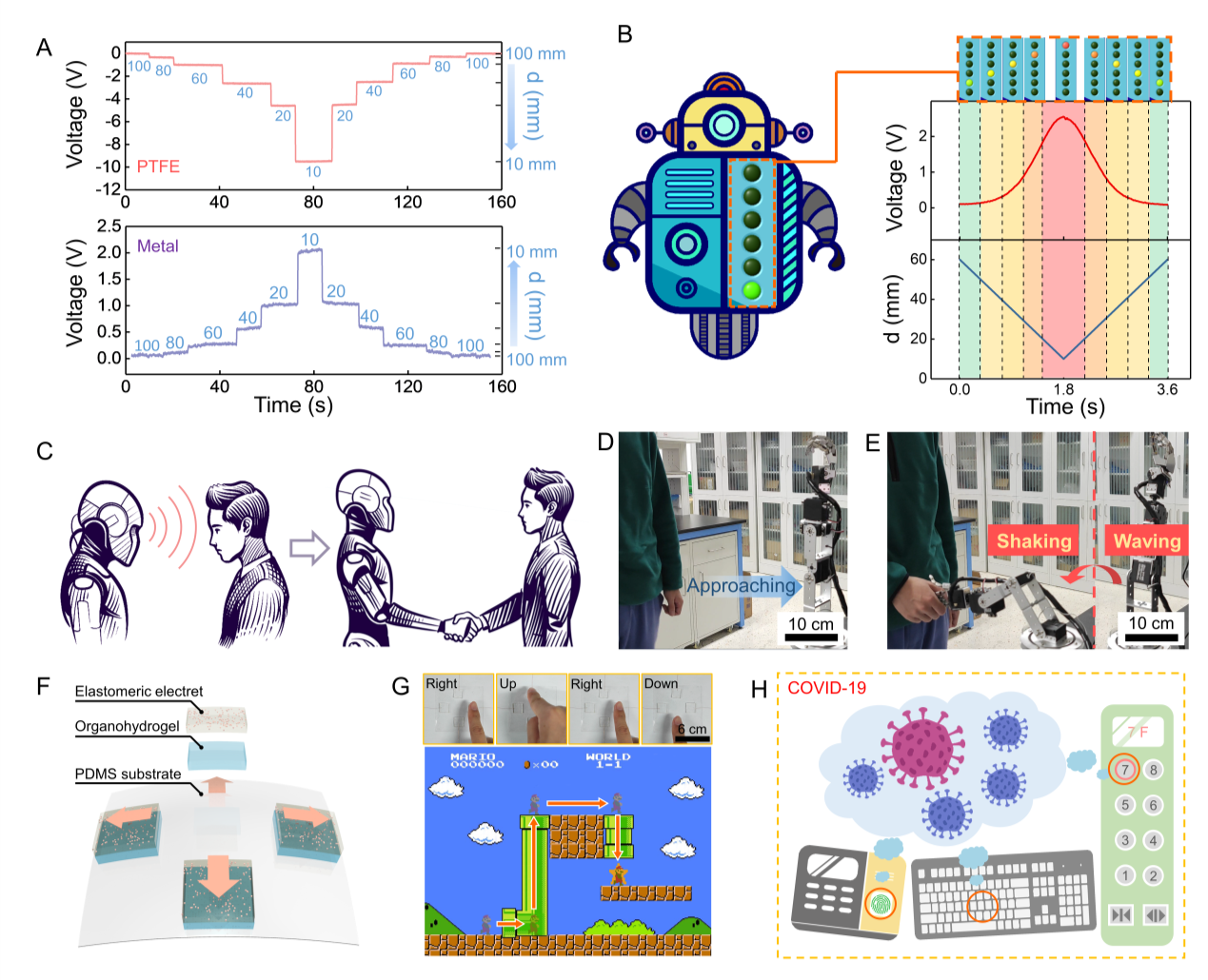
图2. 基于电感受器的非接触式人机交互界面。(A)电感受器对外部目标接近的实时输出响应。(B)基于电感受器的距离感知的虚拟距离报警机器人。(C)基于电感受器的智能机器人系统的场景设想。(D、E)当一个人靠近时,集成有电感受器的机械手臂与人挥手和握手。(F)基于四个电感受器单元的非接触柔性键盘示意图。(G)非接触键盘控制游戏人物的移动。(H)在COVID-19大流行期间,非接触键盘应用于防止病毒传播的设想。
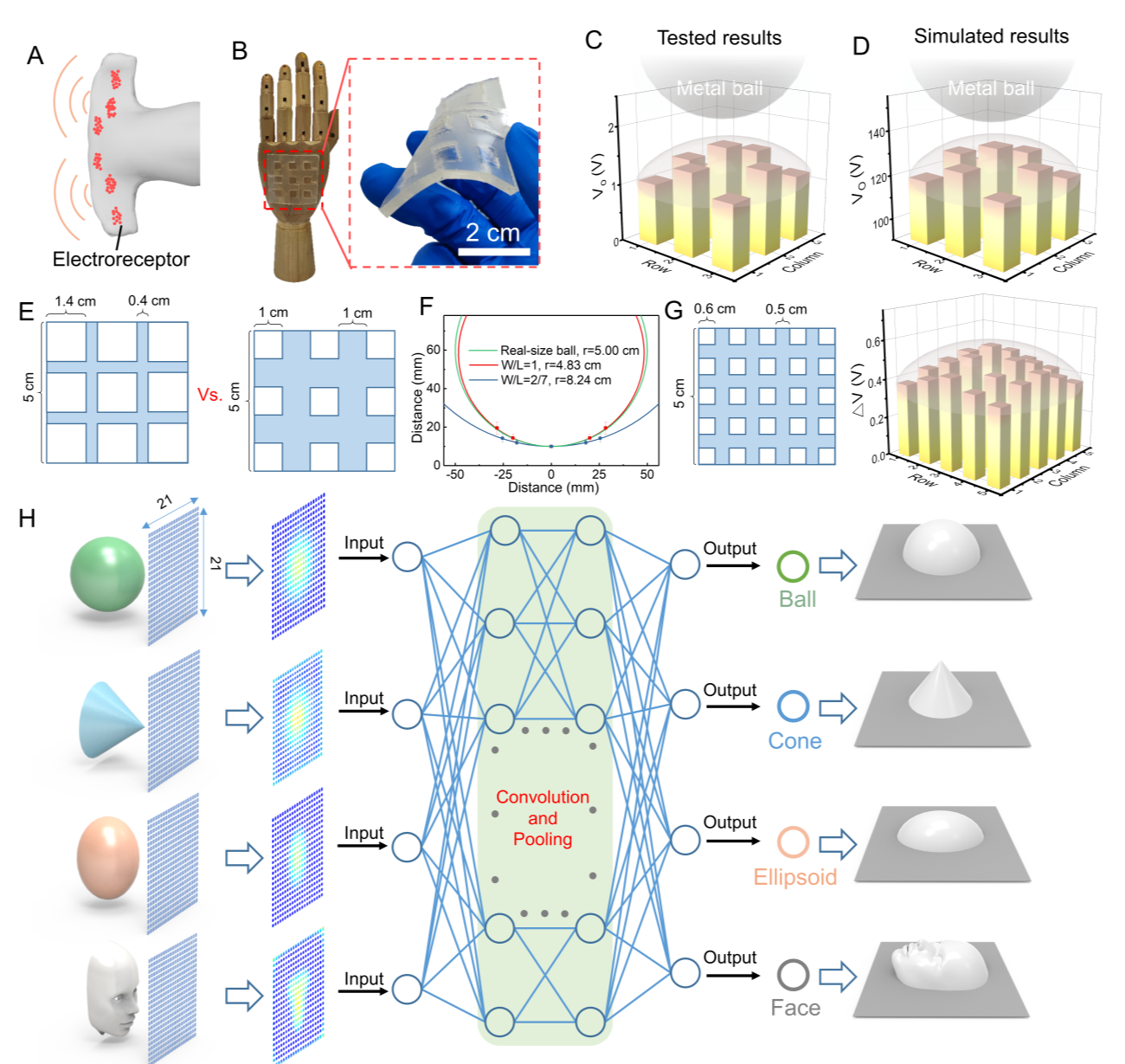
图3. 基于电感受器阵列的仿生非接触体感系统。(A)分布在鲨鱼头部的电感受器网络。(B)3 × 3电感受器阵列的照片。3 × 3电感受器矩阵识别一个金属球轮廓的 (C)实验结果和(D)模拟结果。(E) (F)不同W/L比的电感受器阵列(W/L分别为2/7和1/1)的识别结果比较。(G) 5 × 5电感受器矩阵的结构和金属球靠近时的电压分布,W/L之比= 5/6。(H)基于21 × 21的电感受器阵列和卷积神经网络(CNN)的物体三维轮廓识别体感系统。
该工作是团队近期在软体离子电子器件领域的最新进展之一。软体的离子电子器件利用离子导体电极代替电子导体电极,可实现本征低模量、高弹性的电子器件。研究团队开发了基于水凝胶电极的可拉伸摩擦纳米发电机,实现了高弹性的机电能量转换器件(Sci. Adv. 2017, 3, e1700015);并进一步报道了基于水凝胶-介电聚合物界面动态双电层的机电能量转换机制(ACS Nano 2021, 15, 19651);开发了水凝胶纤维的干湿法纺丝制备方法,实现了凝胶纤维基离子电子器件(Nano Energy 2020, 78, 105389)。针对凝胶电极存在溶剂易挥发、挤压漏夜等问题,设计制备了一种动态交联的固态离子导体,获得了优异的环境稳定性和高的离子电导率,实现了环境稳定的离子皮肤和电致发光器件(Adv. Mater. 2021, 33, 2101396)。
原文链接:https://www.science.org/doi/full/10.1126/sciadv.abo5201