磁性微型软体机器人可以无创地进入受限空间,并为微创手术、显微操作和靶向药物递送等生物医学应用提供理想的解决方案。然而,现有的基于弹性体(例如,硅胶,水凝胶等)和基于流体(例如,磁流体,液态金属等)的磁驱动微型软体机器人存在各自的局限性。由于其有限的变形能力,基于弹性体的微型软体机器人难以在极端受限的环境中运动,很难通过小于自身尺寸的通道。相比之下,基于流体的软体机器人变形能力更强,但也受到流体本身形状不稳定的限制,因此对环境的适应能力较差。因此,将极端变形的特性与环境适应性相结合,打造新型软体机器人是一项巨大的挑战。
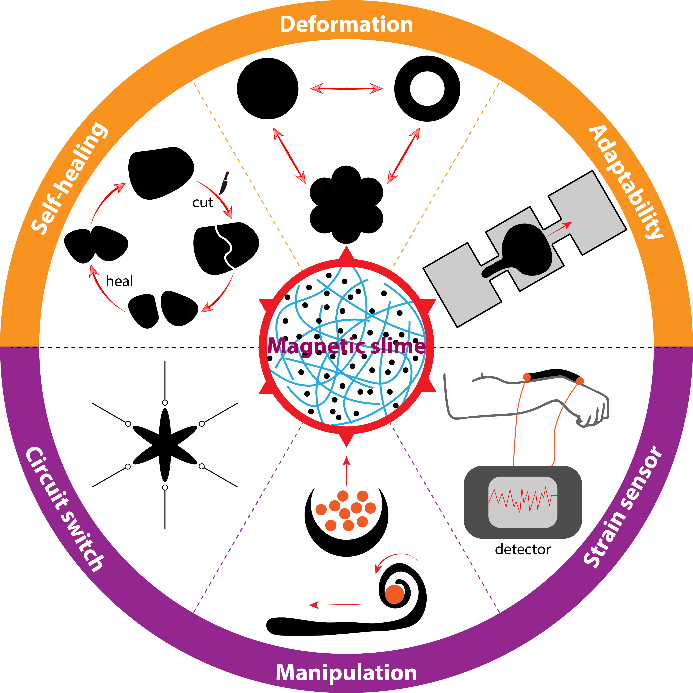
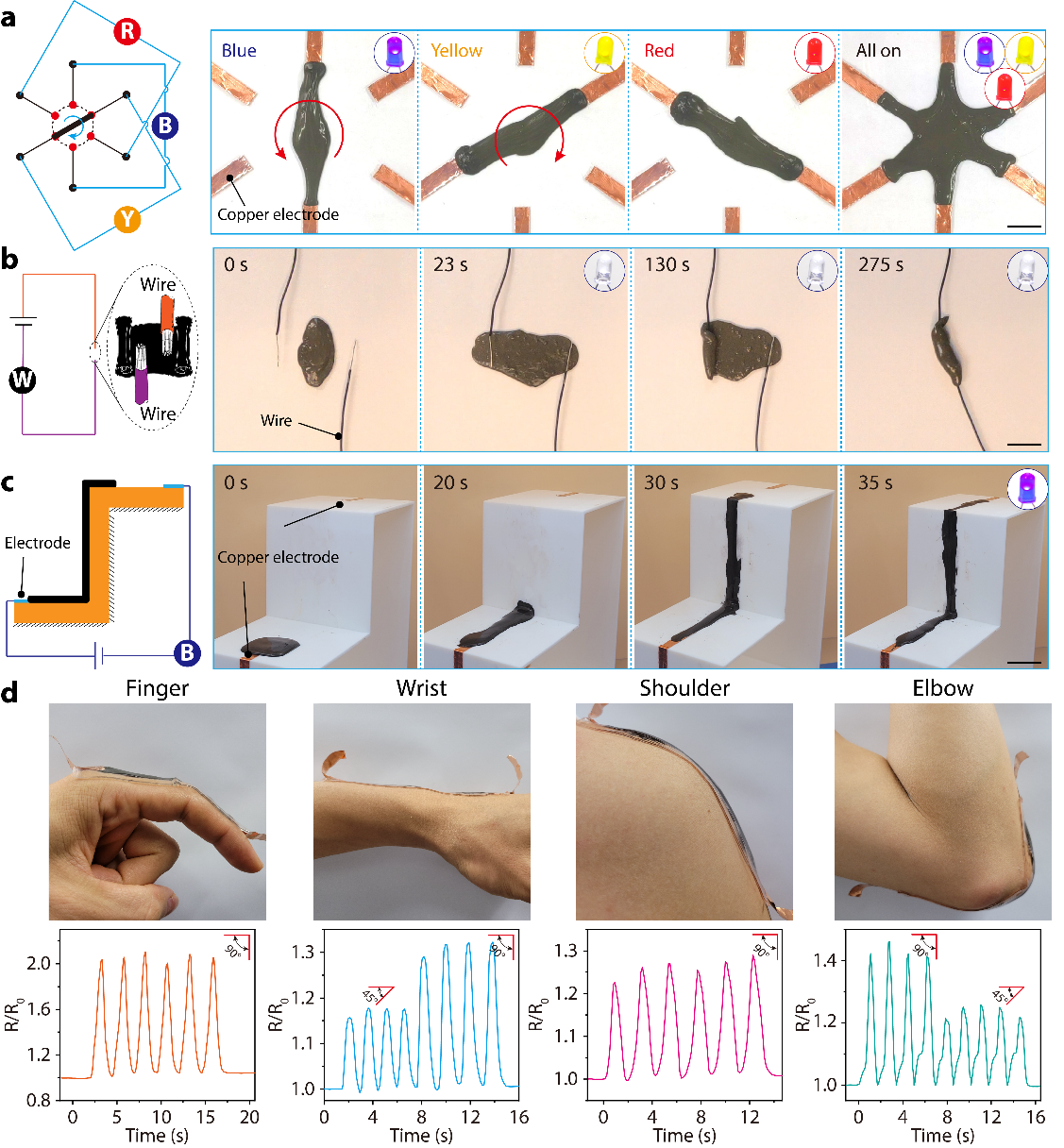
鉴于此,香港中文大学张立教授团队、哈尔滨工业大学谢晖教授团队报道了一种磁驱动“史莱姆”软体机器人,它既具有基于磁性弹性体的机器人的环境适应性,又具有基于磁性流体的机器人的极端变形能力。磁性“史莱姆”是一种非牛顿流体水凝胶,具有粘弹性,在很长一段时间内表现为粘性液体,但在短时间内表现为弹性固体。而“史莱姆”机器人可以轻松通过直径为 1.5 毫米的狭窄通道,并在气体、液体环境中的多种基底上进行可控运动(图1)。这种磁驱动“史莱姆”机器人具备多种功能,例如可以通过卷曲或胞吞模式进行物体捕获操纵(图2),以及利用自己的导电特性进行电路修复和切换控制,甚至可以重新配置为用于监测人体运动的应变传感器(图3)。这项研究工作提出了新型软体机器人的设计方案,所提出的磁性“史莱姆”机器人具有极强的环境适应性,而且兼具可变形、可重构、自愈和导电的特性,使其在生物医学和可穿戴设备中的应用中前景广阔。该工作以“Reconfigurable Magnetic Slime Robot: Deformation, Adaptability, and Multifunction”为题发表在《Advanced Functional Materials》。文章第一作者是香港中文大学博士后孙猛猛博士,香港中文大学张立教授和哈尔滨工业大学谢晖教授为论文的共同通讯作者。
该工作是张立教授团队近期关于磁驱动微型机器人相关研究的最新进展之一。近年来,张立教授课题组报道了一系列磁驱动微型机器人研究成果,实现了毫米尺度软体机器人磁编程控制和微米尺度机器人群体调控。(Adv. Mater. 2022, 2109126; Sci. Rob., 2021, 6(52); Sci. Adv., 2021, 7(9); Adv. Mater., 2021, 33(4); Adv. Mater., 2021, 33(37); Nat. Commun., 2019, 10(1); Nat. Commun., 2018, 9(1).)
原文链接:https://onlinelibrary.wiley.com/doi/full/10.1002/adfm.202112508